










よむ、つかう、まなぶ。
資料2 規制改革推進に関する答申(案) (157 ページ)
出典
| 公開元URL | https://www8.cao.go.jp/kisei-kaikaku/kisei/meeting/committee/260629/agenda.html |
| 出典情報 | 規制改革推進会議(第28回 6/29)《内閣府》 |
ページ画像
ダウンロードした画像を利用する際は「出典情報」を明記してください。
低解像度画像をダウンロード
プレーンテキスト
資料テキストはコンピュータによる自動処理で生成されており、完全に資料と一致しない場合があります。
テキストをコピーしてご利用いただく際は資料と付け合わせてご確認ください。
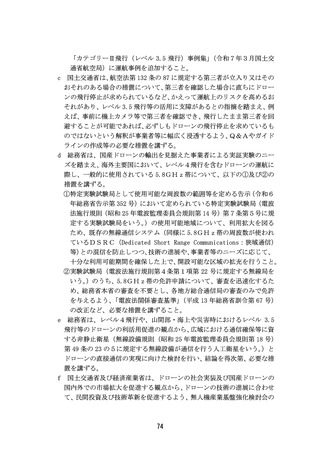
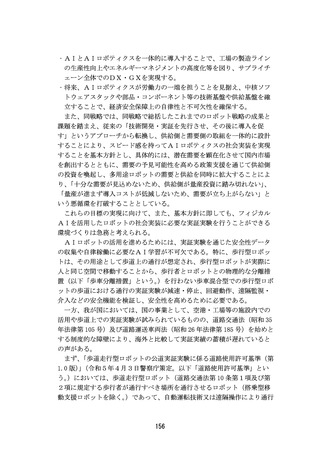
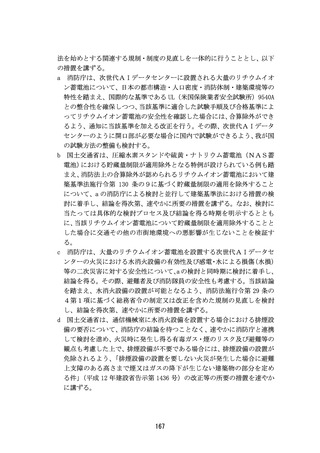
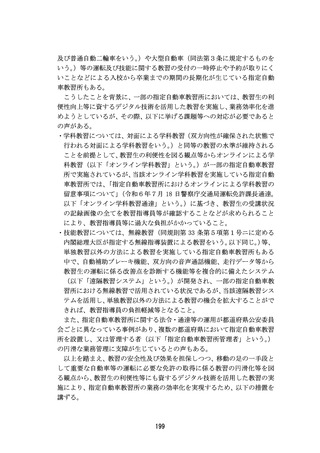
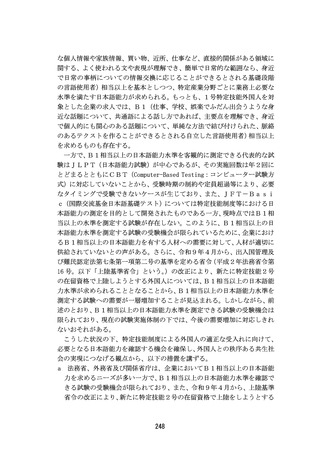
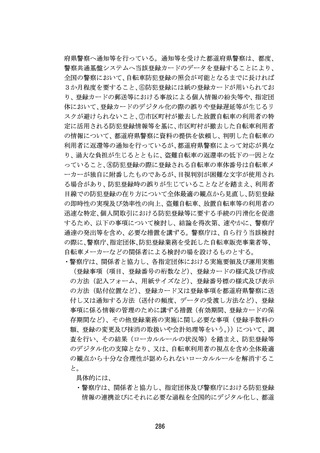
‐AIとAIロボティクスを一体的に導入することで、工場の製造ライン
の生産性向上やエネルギーマネジメントの高度化等を図り、サプライチ
ェーン全体でのDX・GXを実現する。
‐将来、AIロボティクスが労働力の一端を担うことを見据え、中核ソフ
トウェアスタックや部品・コンポーネント等の技術基盤や供給基盤を確
立することで、経済安全保障上の自律性と不可欠性を確保する。
また、同戦略では、同戦略で総括したこれまでのロボット戦略の成果と
課題を踏まえ、従来の「技術開発・実証を先行させ、その後に導入を促
す」というアプローチから転換し、供給側と需要側の取組を一体的に設計
することにより、スピード感を持ってAIロボティクスの社会実装を実現
することを基本方針とし、具体的には、潜在需要を顕在化させて国内市場
を創出するとともに、需要の予見可能性を高める政策支援を通じて供給側
の投資を喚起し、多用途ロボットの需要と供給を同時に拡大することによ
り、「十分な需要が見込めないため、供給側が量産投資に踏み切れない」、
「量産が進まず導入コストが低減しないため、需要が立ち上がらない」と
いう悪循環を打破することとしている。
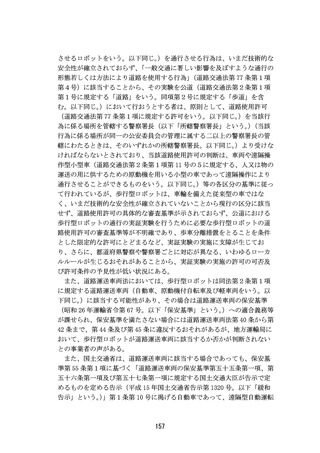
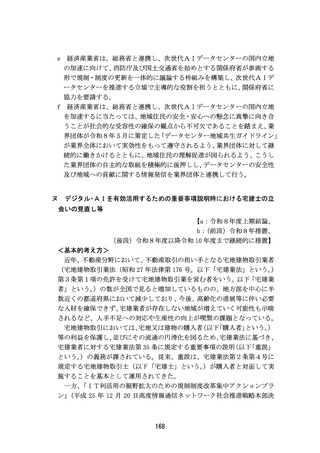
これらの目標の実現に向けて、また、基本方針に即しても、フィジカル
AIを活用したロボットの社会実装に必要な実証実験を行うことができる
環境づくりは急務と考えられる。
AIロボットの活用を進めるためには、実証実験を通じた安全性データ
の収集や自律稼働に必要なAI学習が不可欠である。特に、歩行型ロボッ
トは、その用途として歩道上の通行が想定され、歩行型ロボットが実際に
人と同じ空間で移動することから、歩行者とロボットとの物理的な分離措
置(以下「歩車分離措置」という。)を行わない歩車混合型での歩行型ロボ
ットの歩道における通行の実証実験が減速・停止、回避動作、遠隔監視・
介入などの安全機能を検証し、安全性を高めるために必要である。
一方、我が国においては、国の事業として、空港・工場等の施設内での
活用や歩道上での実証実験が試みられているものの、道路交通法(昭和 35
年法律第 105 号)及び道路運送車両法(昭和 26 年法律第 185 号)を始めと
する制度的な障壁により、海外と比較して実証実績の蓄積が遅れていると
の声がある。
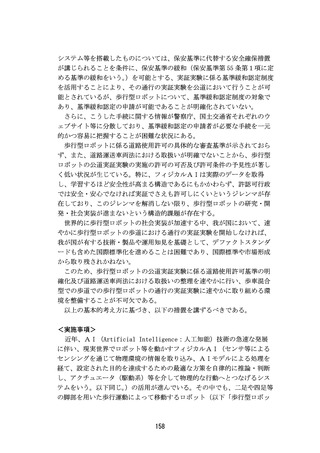
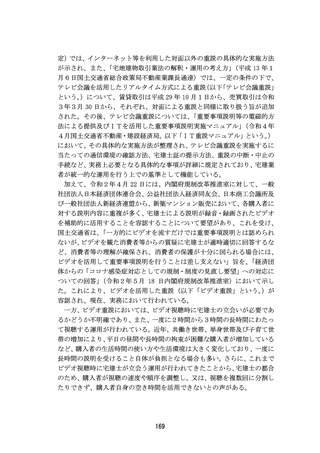
まず、「歩道走行型ロボットの公道実証実験に係る道路使用許可基準(第
1.0 版)」(令和5年4月3日警察庁策定。以下「道路使用許可基準」とい
う。)においては、歩道走行型ロボット(道路交通法第 10 条第1項及び第
2項に規定する歩行者が通行すべき場所を通行させるロボット(搭乗型移
動支援ロボットを除く。)であって、自動運転技術又は遠隔操作により通行
156
の生産性向上やエネルギーマネジメントの高度化等を図り、サプライチ
ェーン全体でのDX・GXを実現する。
‐将来、AIロボティクスが労働力の一端を担うことを見据え、中核ソフ
トウェアスタックや部品・コンポーネント等の技術基盤や供給基盤を確
立することで、経済安全保障上の自律性と不可欠性を確保する。
また、同戦略では、同戦略で総括したこれまでのロボット戦略の成果と
課題を踏まえ、従来の「技術開発・実証を先行させ、その後に導入を促
す」というアプローチから転換し、供給側と需要側の取組を一体的に設計
することにより、スピード感を持ってAIロボティクスの社会実装を実現
することを基本方針とし、具体的には、潜在需要を顕在化させて国内市場
を創出するとともに、需要の予見可能性を高める政策支援を通じて供給側
の投資を喚起し、多用途ロボットの需要と供給を同時に拡大することによ
り、「十分な需要が見込めないため、供給側が量産投資に踏み切れない」、
「量産が進まず導入コストが低減しないため、需要が立ち上がらない」と
いう悪循環を打破することとしている。
これらの目標の実現に向けて、また、基本方針に即しても、フィジカル
AIを活用したロボットの社会実装に必要な実証実験を行うことができる
環境づくりは急務と考えられる。
AIロボットの活用を進めるためには、実証実験を通じた安全性データ
の収集や自律稼働に必要なAI学習が不可欠である。特に、歩行型ロボッ
トは、その用途として歩道上の通行が想定され、歩行型ロボットが実際に
人と同じ空間で移動することから、歩行者とロボットとの物理的な分離措
置(以下「歩車分離措置」という。)を行わない歩車混合型での歩行型ロボ
ットの歩道における通行の実証実験が減速・停止、回避動作、遠隔監視・
介入などの安全機能を検証し、安全性を高めるために必要である。
一方、我が国においては、国の事業として、空港・工場等の施設内での
活用や歩道上での実証実験が試みられているものの、道路交通法(昭和 35
年法律第 105 号)及び道路運送車両法(昭和 26 年法律第 185 号)を始めと
する制度的な障壁により、海外と比較して実証実績の蓄積が遅れていると
の声がある。
まず、「歩道走行型ロボットの公道実証実験に係る道路使用許可基準(第
1.0 版)」(令和5年4月3日警察庁策定。以下「道路使用許可基準」とい
う。)においては、歩道走行型ロボット(道路交通法第 10 条第1項及び第
2項に規定する歩行者が通行すべき場所を通行させるロボット(搭乗型移
動支援ロボットを除く。)であって、自動運転技術又は遠隔操作により通行
156