










よむ、つかう、まなぶ。
資料16 省力化投資促進プラン(案)運輸業 (63 ページ)
出典
| 公開元URL | https://www.cas.go.jp/jp/seisaku/atarashii_sihonsyugi/kaigi/dai34/gijisidai.html |
| 出典情報 | 新しい資本主義実現会議(第34回 5/14)《内閣官房》 |
ページ画像
ダウンロードした画像を利用する際は「出典情報」を明記してください。
低解像度画像をダウンロード
プレーンテキスト
資料テキストはコンピュータによる自動処理で生成されており、完全に資料と一致しない場合があります。
テキストをコピーしてご利用いただく際は資料と付け合わせてご確認ください。
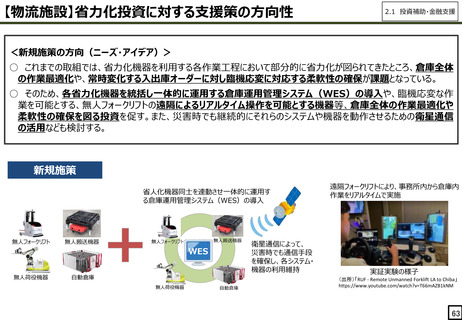
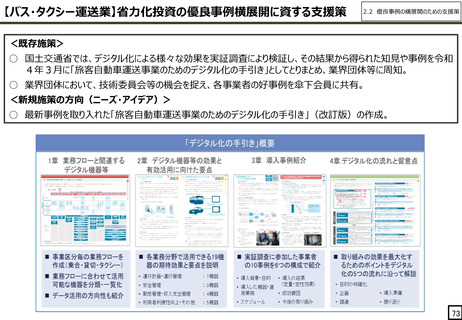
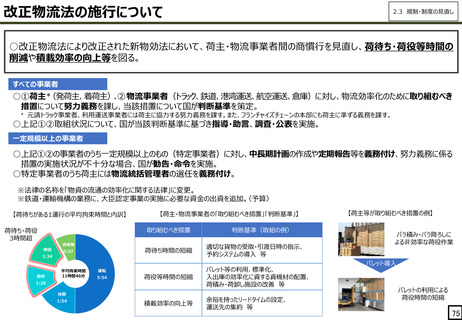
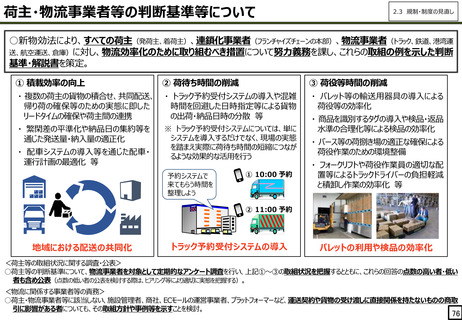
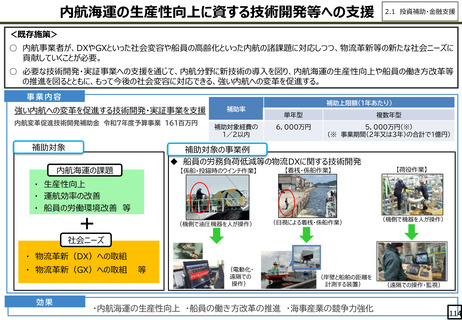
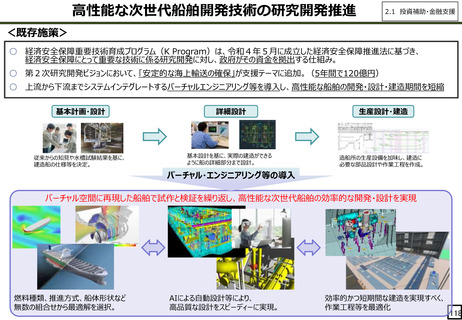
【物流施設】省力化投資に対する支援
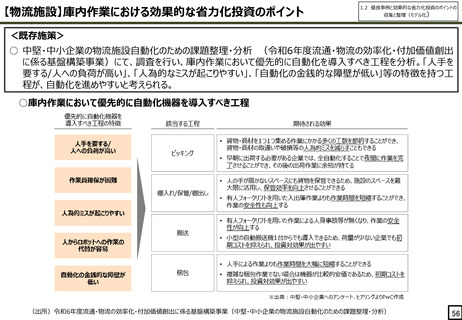
<既存施策>
2.1 投資補助・金融支援
入荷
保管
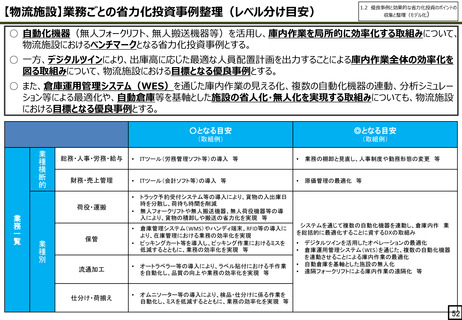
これまで、荷主・物流事業者の物流施設や施設構内における省力化・省人化を進めるため、荷役や運
搬等の作業において、無人フォークリフト・無人搬送機器・自動倉庫等の自動化機器の導入や、それらを
デバン(荷卸)
搬送
入庫(棚入)
保管
出庫(棚出)
搬送
利用するシステムの構築・連携を行う取組に対して、支援を行っているところ。
保管形式
○ (経済産業省)物流効率化に向けた先進的な実証事業
(補助対象:システムの構築・連携、自動化機器)
検品
ピッキング
逆ネステナー
ピッキング方式
○ (経済産業省)持続可能な物流を支える物流効率化実証事業
(補助対象:システムの構築・連携、自動化機器)
中量棚
シングルオーダー
○ (国土交通省)中小物流事業者の労働生産性向上事業
(補助対象:システムの構築・連携、自動化機器)
作業(開梱)
姿 ○ (環境省)サステナブル倉庫モデル促進事業
ース(パレット)
○ (農林水産省)物流生産性向上推進事業
ース(バラ)
ロケーション
※:自動化機器の導入) ※ 省CO2化・省人化機器等が対象等の条件有り
フリー
(補助対象
等 (補助対象:システムの構築・連携、自動化機器)
○ (中小企業庁)中小企業省力化投資補助事業 (補助対象:自動化機器の導入)
既存施策における取組事例
デジタルツイン+最適化シミュレーション
倉庫管理システム(WMS)
マテハン機器の導入による庫内作業員の労働負荷の軽減
導入前
デバンダによる
作業員の負担軽減
労働負荷が
高い場所
作業員が
複数必要
導入後
梱包作業員
フォークリフト作業員
パレタイザー
商品・在庫・出庫データ連携
による無人化
貨物自動ラッピングマシン
によるパレタイズ貨物の
荷崩れ防止
デジタルツインや無人搬送機の導入による作業の効率化
デジタルツインの導入による最適なピッキングルートの設定と、
無人搬送機器の導入によるピッキング作業の無人化
デジタル上で倉庫内空間(エリアとロケーション)を再現
デジタル上で
倉庫内空間を再現
ピッキング~梱包工程を再現
&
最適化シミュレーション
【期待される効果】
ピッキング:67.7箇所/(人・h)→ 73.9箇所/(人・h)
梱包数 :23.0個 /(人・h)→ 28.5個 /(人・h)
62
21
<既存施策>
2.1 投資補助・金融支援
入荷
保管
これまで、荷主・物流事業者の物流施設や施設構内における省力化・省人化を進めるため、荷役や運
搬等の作業において、無人フォークリフト・無人搬送機器・自動倉庫等の自動化機器の導入や、それらを
デバン(荷卸)
搬送
入庫(棚入)
保管
出庫(棚出)
搬送
利用するシステムの構築・連携を行う取組に対して、支援を行っているところ。
保管形式
○ (経済産業省)物流効率化に向けた先進的な実証事業
(補助対象:システムの構築・連携、自動化機器)
検品
ピッキング
逆ネステナー
ピッキング方式
○ (経済産業省)持続可能な物流を支える物流効率化実証事業
(補助対象:システムの構築・連携、自動化機器)
中量棚
シングルオーダー
○ (国土交通省)中小物流事業者の労働生産性向上事業
(補助対象:システムの構築・連携、自動化機器)
作業(開梱)
姿 ○ (環境省)サステナブル倉庫モデル促進事業
ース(パレット)
○ (農林水産省)物流生産性向上推進事業
ース(バラ)
ロケーション
※:自動化機器の導入) ※ 省CO2化・省人化機器等が対象等の条件有り
フリー
(補助対象
等 (補助対象:システムの構築・連携、自動化機器)
○ (中小企業庁)中小企業省力化投資補助事業 (補助対象:自動化機器の導入)
既存施策における取組事例
デジタルツイン+最適化シミュレーション
倉庫管理システム(WMS)
マテハン機器の導入による庫内作業員の労働負荷の軽減
導入前
デバンダによる
作業員の負担軽減
労働負荷が
高い場所
作業員が
複数必要
導入後
梱包作業員
フォークリフト作業員
パレタイザー
商品・在庫・出庫データ連携
による無人化
貨物自動ラッピングマシン
によるパレタイズ貨物の
荷崩れ防止
デジタルツインや無人搬送機の導入による作業の効率化
デジタルツインの導入による最適なピッキングルートの設定と、
無人搬送機器の導入によるピッキング作業の無人化
デジタル上で倉庫内空間(エリアとロケーション)を再現
デジタル上で
倉庫内空間を再現
ピッキング~梱包工程を再現
&
最適化シミュレーション
【期待される効果】
ピッキング:67.7箇所/(人・h)→ 73.9箇所/(人・h)
梱包数 :23.0個 /(人・h)→ 28.5個 /(人・h)
62
21