


よむ、つかう、まなぶ。
資料16 省力化投資促進プラン(案)製造業(中小製造業) (19 ページ)
出典
| 公開元URL | https://www.cas.go.jp/jp/seisaku/atarashii_sihonsyugi/kaigi/dai34/gijisidai.html |
| 出典情報 | 新しい資本主義実現会議(第34回 5/14)《内閣官房》 |
ページ画像
ダウンロードした画像を利用する際は「出典情報」を明記してください。
低解像度画像をダウンロード
プレーンテキスト
資料テキストはコンピュータによる自動処理で生成されており、完全に資料と一致しない場合があります。
テキストをコピーしてご利用いただく際は資料と付け合わせてご確認ください。
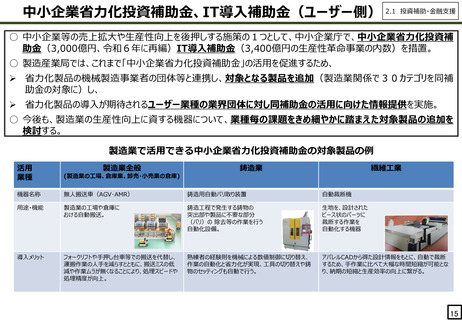
ロボットのオープンな開発基盤の構築(サプライ側) 2.1 投資補助・金融支援
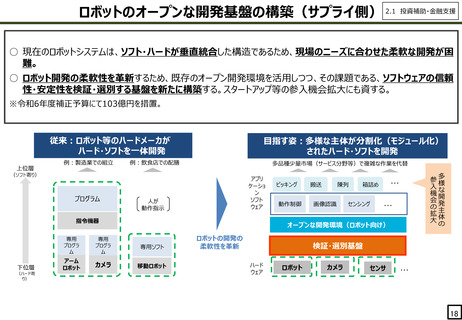
○ 現在のロボットシステムは、ソフト・ハードが垂直統合した構造であるため、現場のニーズに合わせた柔軟な開発が困
難。
○ ロボット開発の柔軟性を革新するため、既存のオープン開発環境を活用しつつ、その課題である、ソフトウェアの信頼
性・安定性を検証・選別する基盤を新たに構築する。スタートアップ等の参入機会拡大にも資する。
※令和6年度補正予算にて103億円を措置。
従来:ロボット等のハードメーカが
ハード・ソフトを一体開発
上位層
例:製造業での組立
目指す姿:多様な主体が分割化(モジュール化)
されたハード・ソフトを開発
例:飲食店での配膳
多品種少量市場(サービス分野等)で複雑な作業を代替
(ソフト寄り)
プログラム
アプリ
ケーショ
ン
ソフト
ウェア
人が
動作指示
指令機器
下位層
(ハード寄
り)
ピッキング
搬送
陳列
動作制御
画像認識
センシング
多
参様
入な
機開
会発
の主
拡体
大の
…
箱詰め
…
オープンな開発環境(ロボット向け)
専用
プログラ
ム
専用
プログラ
ム
専用ソフト
アーム
ロボット
カメラ
移動ロボット
ロボットの開発の
柔軟性を革新
検証・選別基盤
ハード
ウェア
ロボット
カメラ
センサ
…
18
○ 現在のロボットシステムは、ソフト・ハードが垂直統合した構造であるため、現場のニーズに合わせた柔軟な開発が困
難。
○ ロボット開発の柔軟性を革新するため、既存のオープン開発環境を活用しつつ、その課題である、ソフトウェアの信頼
性・安定性を検証・選別する基盤を新たに構築する。スタートアップ等の参入機会拡大にも資する。
※令和6年度補正予算にて103億円を措置。
従来:ロボット等のハードメーカが
ハード・ソフトを一体開発
上位層
例:製造業での組立
目指す姿:多様な主体が分割化(モジュール化)
されたハード・ソフトを開発
例:飲食店での配膳
多品種少量市場(サービス分野等)で複雑な作業を代替
(ソフト寄り)
プログラム
アプリ
ケーショ
ン
ソフト
ウェア
人が
動作指示
指令機器
下位層
(ハード寄
り)
ピッキング
搬送
陳列
動作制御
画像認識
センシング
多
参様
入な
機開
会発
の主
拡体
大の
…
箱詰め
…
オープンな開発環境(ロボット向け)
専用
プログラ
ム
専用
プログラ
ム
専用ソフト
アーム
ロボット
カメラ
移動ロボット
ロボットの開発の
柔軟性を革新
検証・選別基盤
ハード
ウェア
ロボット
カメラ
センサ
…
18